北京航空航天大学联合多单位组成的科研团队在深海小型深潜机器人方面取得的最新成果。介绍了该机器人在马里亚纳海沟等极端深海环境下的出色表现、研发中遇到的难题及解决方法,还提及了其小型化、低成本的特点和未来的研究方向。
在地球的最深处——马里亚纳海沟的万米深渊之处,那里的环境极端恶劣。其压强巨大,相当于一个指甲盖上站着一头重达一吨的犀牛,而且温度也接近冰点。对于身长在1米以内的小型机器人而言,这样的极端环境曾经就如同“禁区”一般,会让它们在其中的行动举步维艰。
日前,由北京航空航天大学牵头,联合中科院深海所、浙江大学等单位共同组成的科研团队,公布了深海小型深潜机器人的最新研究成果。该机器人在马里亚纳海沟等深海环境中进行测试时,展现出了令人惊叹的性能,其运动性能媲美甚至超越了在实验室常温常压下的表现。这一重要成果已经在知名国际学术期刊《科学·机器人》上发表。
从深海小型机器人在水深1384米的中国南海海马冷泉进行测试的画面中,我们可以清晰地看到,在这次测试里,深海小型机器人顺利完成了游动、滑行、变形和爬行等所有测试科目。它在深海中的表现十分出色,甚至比在地面实验室中的表现还要好。


在此之前,科研团队已经对深海小型机器人进行过多次深海测试,其中最深到达了马里亚纳海沟10666米深的海底。这主要得益于全新设计的柔性深海驱动装置。即使是在压力巨大的上万米海底,深海小型机器人依然能够像蝠鲼一样自由地游动、滑翔,还能像龙虾一样在海底爬行,并且可以顺畅地在各种运动状态之间进行切换,完美地适应了深海的复杂环境。
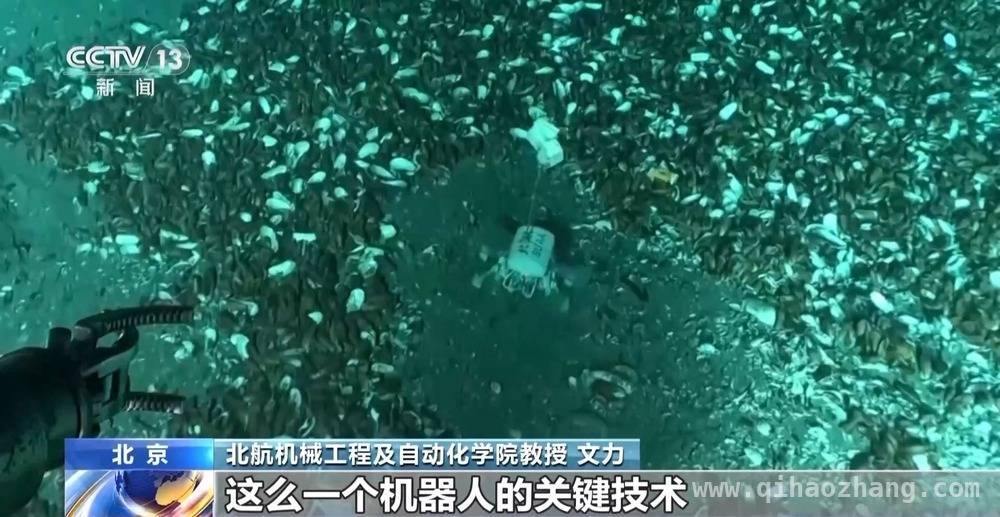
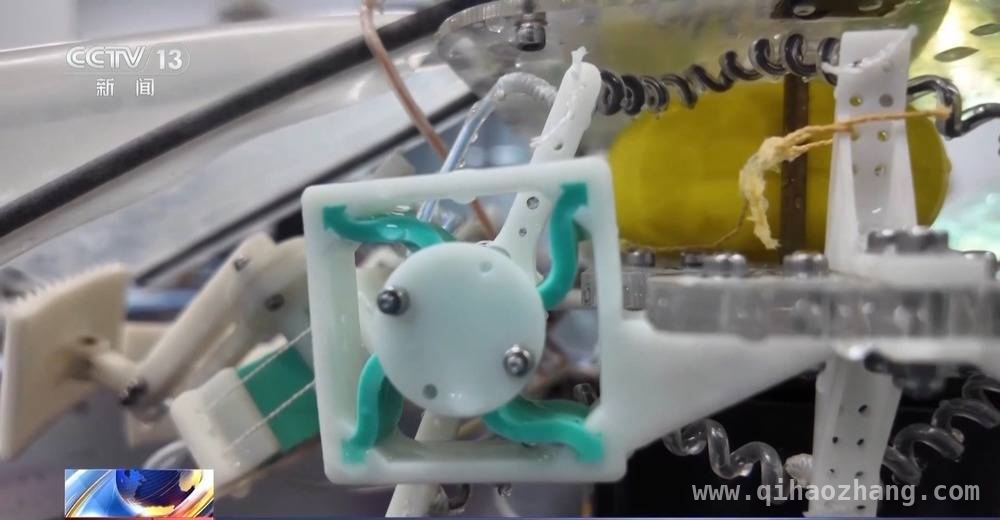
北航机械工程及自动化学院教授 文力表示:在研发过程中,驱动部件,也就是要运动的部件是尤其困难的。深海大型潜航器所使用的电机都非常重,这是因为为了抵御外界的深海压力,需要在运动部件上加一个厚厚的保护壳。然而,如果要把这个应用到这么小的机器人上,如何将驱动器缩小化、轻量化、小尺度化就成了一个很难解决的问题。

文力教授还介绍:团队巧妙地利用了一种叫手性双稳态结构。就像我们平常玩过的一些玩具,从一边的凸起稍稍施加一点力,它就会突跳到另外一边,这个原理在深海环境中非常有效。原因在于深海的压力会把这个软软的、能够突跳的东西压得更硬。
在长达6年的开发历程中,团队成员克服了重重困难,解决了深海环境下的运动模式、自动控制、整体结构设计等众多难题,最终成功完成了深海小型机器人原型的开发。专家指出,这种深海机器人具有小型化和低成本的显著特点,有望在未来成为深海科考以及深海资源开发的有力工具。
文力教授说:“我们研发的这个机器人长度在50厘米以内,重量仅1.5公斤,体积非常小,成本也很低。同时,一次性可以由潜航器携带多个这样的机器人下去进行相关的科考或者作业。”
目前,该科研团队正朝着深海柔性机器人 + AI的研究方向不断努力,致力于为深海智能作业开辟更广阔的发展空间。
本文介绍了北京航空航天大学联合多单位科研团队在深海小型深潜机器人方面的成果。该机器人在极端深海环境测试中表现出色,通过全新设计的柔性深海驱动装置和巧妙利用手性双稳态结构解决了驱动难题。历经6年开发,克服诸多困难完成原型开发,其小型化、低成本特点有望用于未来深海科考和资源开发,团队还将朝着深海柔性机器人 + AI方向研究。
原创文章,作者:Dermot,如若转载,请注明出处:https://www.qihaozhang.com/archives/3479.html