美国加州大学伯克利分校受蜜蜂启发研制出的一款直径不到1厘米的飞行机器人,阐述了其飞行原理、目前存在的不足以及团队后续的改进计划和其他相关研发项目。
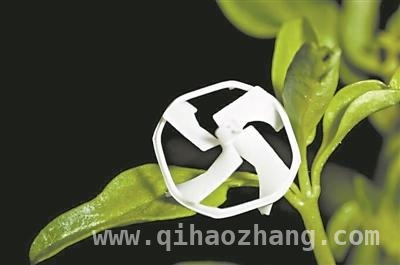

最新消息,美国加州大学伯克利分校的科学家们在科技领域又有了令人瞩目的新成果。他们从大自然中的蜜蜂身上汲取灵感,成功研制出了一款极具创新性的飞行机器人。这款飞行机器人堪称“小巧玲珑”,其直径还不到1厘米,重量更是仅有21毫克。值得一提的是,它目前是世界上实现可控飞行的最小无线机器人。从图片中我们可以看到,这个小家伙配备了两个微型磁铁。该图片的来源正是美国加州大学伯克利分校。
科技日报北京4月1日的报道中(记者刘霞)提到,这款创新成果的相关论文已经发表于最新一期的《科学进展》杂志。其未来的应用前景十分广泛,比如可以用于人工授粉,在农业领域大显身手;还能探索管道内部的微小空间或者其他复杂环境,为工业检测等工作提供便利。
然而,要让如此小巧的机器人实现飞行并非易事。因为让机器人飞行,就必须为其配备电池等电源以及控制飞行的电子设备,可这两者很难集成到极小且轻便的飞行器内。为了攻克这一难题,研究团队想出了一个巧妙的办法,他们使用外部磁场为设备供电,并控制其飞行路径。
从外形上看,新型机器人类似一个小螺旋桨,其内部还内置了两块小磁铁。在外部磁场的作用下,磁铁会受到吸引和排斥,从而使螺旋桨旋转并产生足够的升力,让机器人能够顺利离地飞行。而且,机器人的飞行路径可以由磁场强度精准控制。它就像蜜蜂在花间飞舞采蜜一样灵活,能够悬停、变轨,甚至可以接近并击中小目标。
不过,目前这款机器人也存在一些不足之处。研究团队坦言,它缺乏机载传感器来检测当前所处的位置或飞行轨迹,所以无法实时调整运动模式。虽然它能够精准飞行,但如果遇到环境突变,比如强风来袭,就可能会偏离航线。针对这一问题,团队计划为其添加主动控制功能,这样就能实时改变机器人的姿态和位置。
在操控方面,目前需要强磁场才能对这款机器人进行控制。为了改进这一点,团队还计划将其“体型”进一步缩小到直径小于1毫米。这样一来,无线电波提供的微弱磁场就可以对其进行控制了。
除此之外,团队还在进行另一项重要的研发工作,他们正在研制5毫米级的“集群”机器人。这些机器人功能多样,不仅可以爬行、滚动和旋转,还能像蚂蚁一样协同工作。团队设想,在未来,这些机器人可以被注射到人体内,协同完成消融血栓或其他医疗任务。
本文介绍了美国加州大学伯克利分校研制的超小飞行机器人,阐述其小巧的特点、飞行原理、应用前景及存在的不足,同时提及团队后续的改进计划和其他相关研发项目,展现了科技在微观领域的创新探索和应用潜力。
原创文章,作者:modesty,如若转载,请注明出处:https://www.qihaozhang.com/archives/10314.html